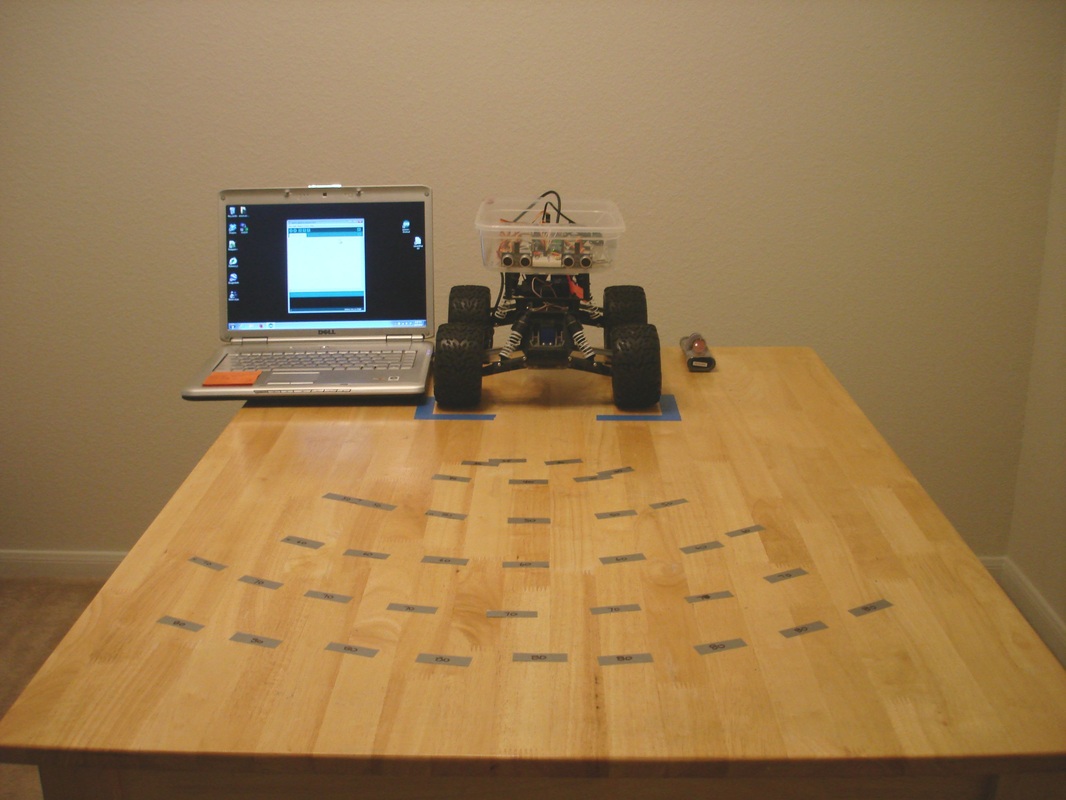
This past week I learned a few things about sonar. As you probably know, I'm working to create a collision avoidance capability so that next year's robot doesn't suffer the same fate as Bebop. Using Brake 'Bot and a few materials, I was able to conduct a lite experiment to see how well these ultrasonic sensors perform.
Would they help Brake 'Bot "see" obstacles in front of it? What kinds of limitations do the sensors have? I managed to answer these and a few other questions. This experiment also raised a few more questions!
Would they help Brake 'Bot "see" obstacles in front of it? What kinds of limitations do the sensors have? I managed to answer these and a few other questions. This experiment also raised a few more questions!
For more details, go here: Sonar Experiment No. 1


 RSS Feed
RSS Feed