
Summary
Bebop is one of two robots I entered to compete in the 2013 SparkFun Autonomous Vehicle Competition (AVC). After seeing pictures from previous years' competitions and lurking on the ArduRover development page, I figured I'd give it a shot and build a rover of my own. Since the software and hardware seemed mature, it was just what I needed to start gaining experience with autonomous ground vehicles. I didn't do it all alone though; I had help from three of my friends - Cowboy, Elliot, and Jeremy. Together, Team Bebop won 3rd place in the Peloton class!
This guide will show you what we did.
This guide will show you what we did.
Topics Covered
0 - SparkFun AVC 2013 Ground Vehicle Course
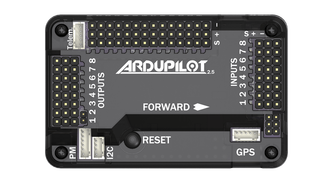
1 - Bebop Hardware
2 - Chassis
3 - Electronics Housing
4 - ArduRover Setup
5 - ArduRover Configuration File
6 - Problems Encountered
7 - Pushbutton Start
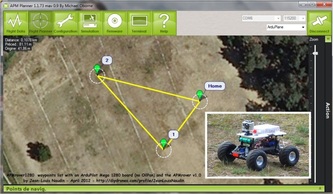
8 - Race Configuration
9 - Competition Results
10 - Lessons Learned
1 - Bebop Hardware
2 - Chassis
3 - Electronics Housing
4 - ArduRover Setup
5 - ArduRover Configuration File
6 - Problems Encountered
7 - Pushbutton Start
8 - Race Configuration
9 - Competition Results
10 - Lessons Learned
Last Update: 30 November 2013