As a follow-up to Sonar Experiment No. 1, I collected sensor data while Brake 'Bot was in motion. The idea was to see how the ultrasonic sensors would perform while working in the environment I intend to use them. As before, I kept only one forward-facing sensor active at a time. I also activated the rear-facing sensor. All range data were logged to an SD card and plotted for analysis.
How noisy are the range data? Can I rely on these sensors to detect obstacles? Although I collected good range data, it's difficult to confidently answer those questions right now. We need more data! Despite this, Experiment No. 2 helped me consider some other factors that I simply didn't think of before.
For more details, go here: Sonar Experiment No. 2
How noisy are the range data? Can I rely on these sensors to detect obstacles? Although I collected good range data, it's difficult to confidently answer those questions right now. We need more data! Despite this, Experiment No. 2 helped me consider some other factors that I simply didn't think of before.
For more details, go here: Sonar Experiment No. 2
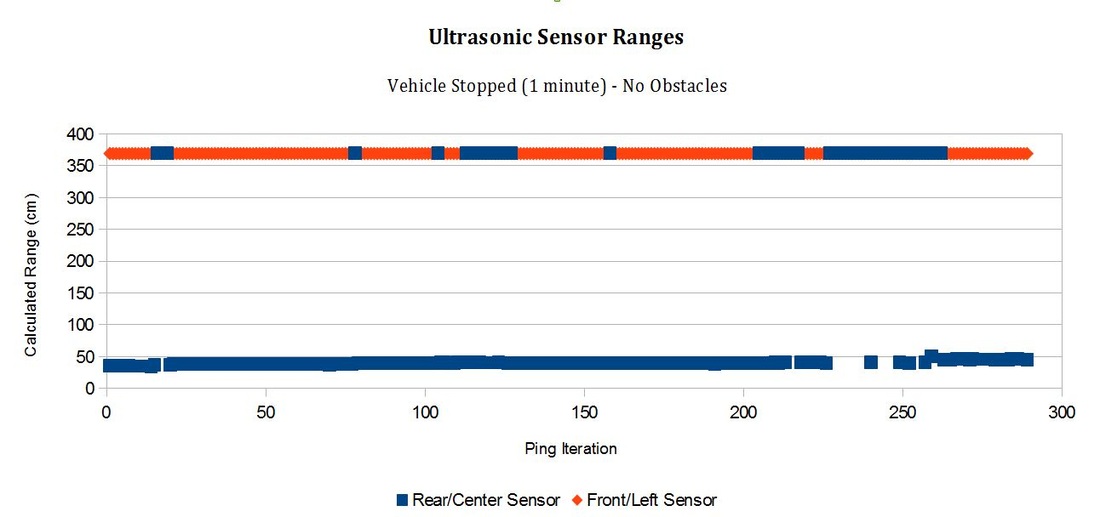
Sample Sensor Data


 RSS Feed
RSS Feed